See below for a list of selected publications (full list on Google scholar).
2025 |
|
|
|
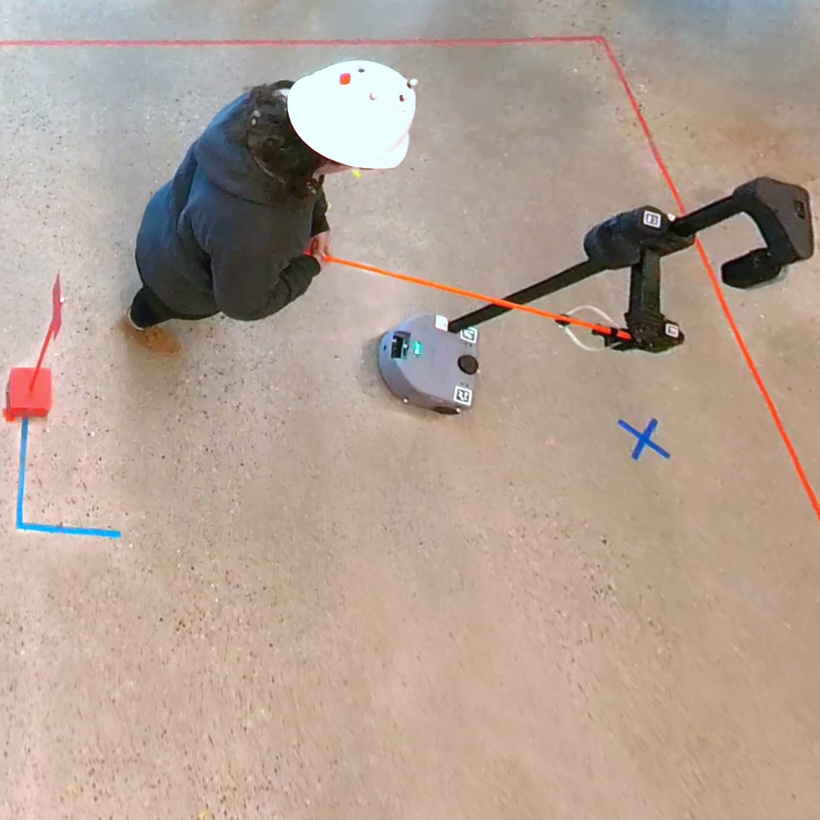
Implicit Communication in Human-Robot Collaborative TransportElvin Yang and Christoforos MavrogiannisACM/IEEE International Conference on Human-Robot Interaction (HRI) video / code / pdf / We developed an algorithmic framework that leverages implicit nonverbal communication via robot motion cues to enable fluent human-robot collaboration on the task of transporting an object. |
|
|
From A to Ω: Pixel Art with a Mobile RobotJeeho Ahn, and Christoforos MavrogiannisArts in Robotics Special Session, IEEE International Conference on Robotics and Automation (ICRA) video / code / pdf / We describe an autonomous system that can create room-scale pixel art by guiding a mobile robot to rearrange a set of pixels via pushing. |
|
|
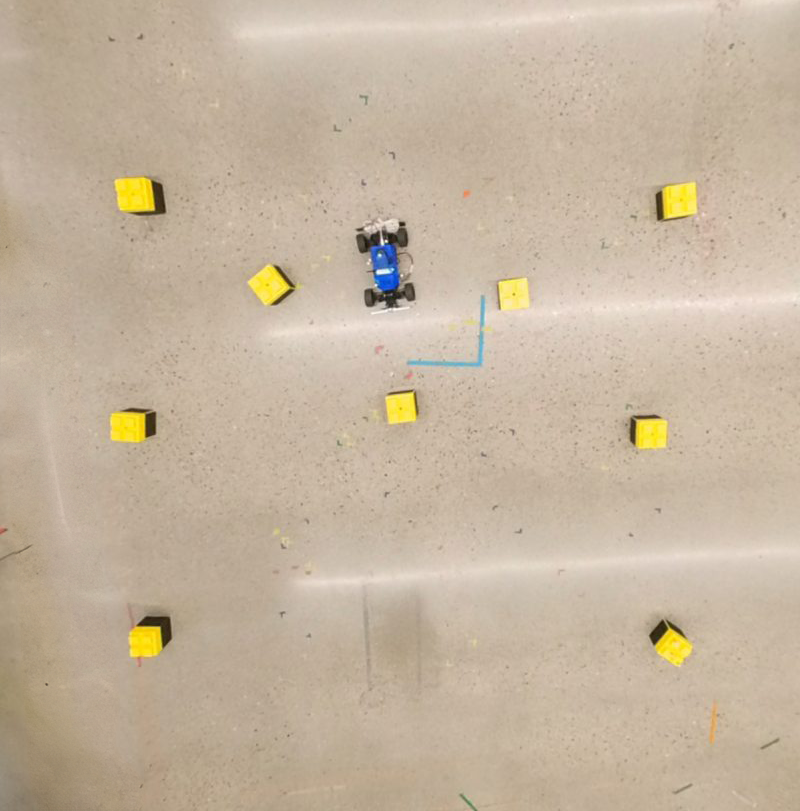
ReloPush: Multi-object Rearrangement in Confined Spaces with a Nonholonomic Mobile Robot PusherJeeho Ahn, and Christoforos MavrogiannisIEEE International Conference on Robotics and Automation (ICRA) video / code / pdf / We developed ReloPush, a planning framework for rearranging multiple objects in cluttered spaces with a nonholonomic mobile robot pusher. |
|
|
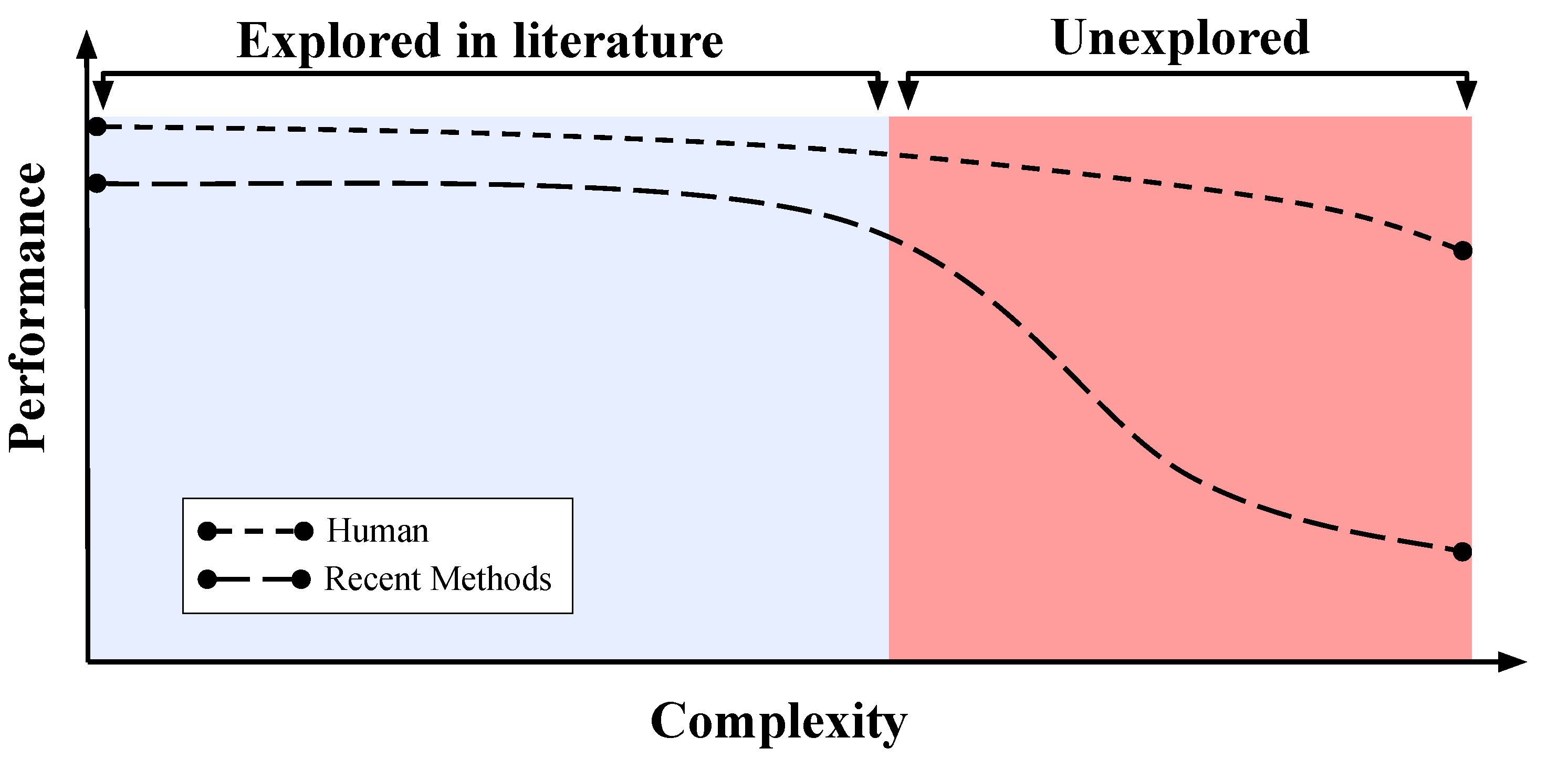
Characterizing the Complexity of Social Robot Navigation ScenariosAndrew Stratton, Kris Hauser, and Christoforos MavrogiannisIEEE Robotics and Automation Letters video / code / pdf / Social navigation algorithms are often demonstrated in overly simplified scenarios. In this work, we explore how contextual factors impact algorithm performance and suggest practical directions for scaling evaluation practices to meet real-world standards. |
2024 |
|
|
|
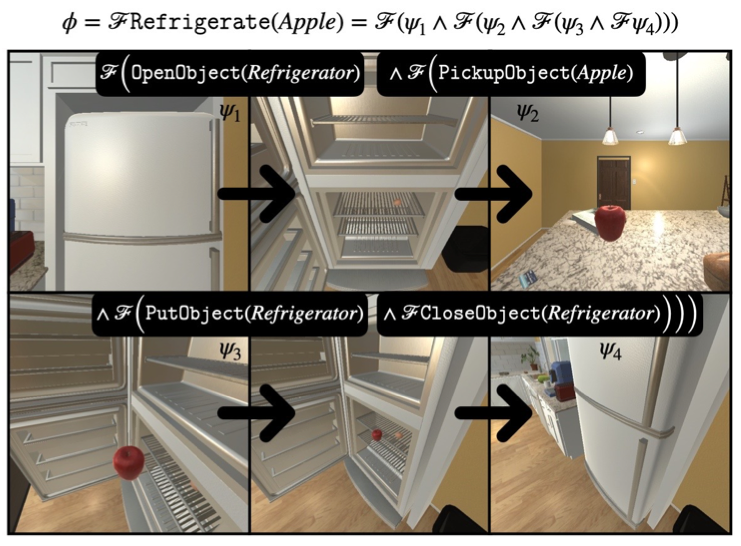
Cook2LTL: Translating cooking recipes to LTL formulae using large language modelsAngelos Mavrogiannis, Christoforos Mavrogiannis, Yiannis AloimonosIEEE International Conference on Robotics and Automation (ICRA) video / code / pdf / We present a system that translates natural language instructions to sequences of robot-executable robot commands in the form of linear temporal logic formulae. We demonstrate the system in the domain of cooking recipes through simulations in AI2-THOR. |
|
|
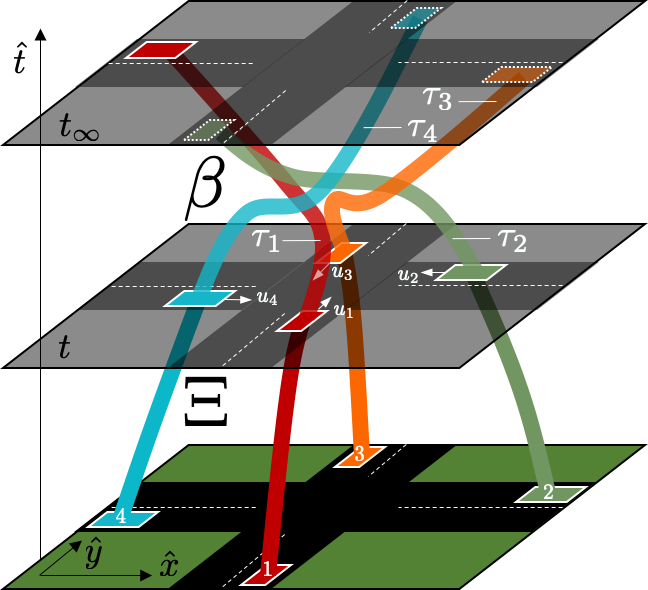
Abstracting road traffic via topological braids: Applications to traffic flow analysis and distributed controlChristoforos Mavrogiannis, Jonathan DeCastro, Siddhartha SrinivasaThe International Journal of Robotics Research, WAFR 2022 Special Issue pdf / WAFR 2022 version / We abstract road traffic using topological braids. We show that braids may uncover insights about the interactivity of vehicles in complex scenes, and guide decision making of non-communicating agents. |
|
|
Demonstrating HOUND: A Low-cost Research Platform for High-speed Off-road Underactuated Nonholonomic DrivingSidharth Talia, Matt Schmittle, Alexander Lambert, Alexander Spitzer, Christoforos Mavrogiannis, Siddhartha S. SrinivasaRobotics: Science and Systems (RSS) pdf / project / We present HOUND, a small-scale, inexpensive, off-road autonomy platform that handles challenging off-road terrains at high speeds through the integration of a rollover prevention system. HOUND is integrated with a complete stack for perception and control. |
|
|
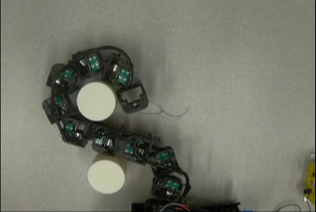
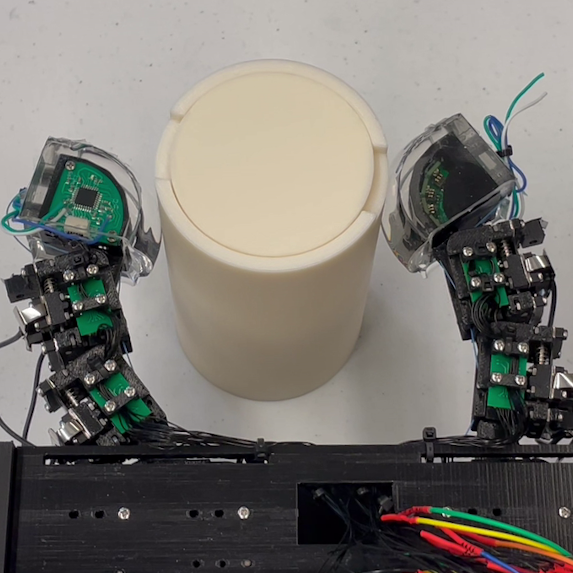
Electrostatic brakes enable individual joint control of underactuated, highly articulated robotsPatrick Lancaster, Christoforos Mavrogiannis, Siddhartha Srinivasa, Joshua SmithThe International Journal of Robotics Research video / pdf / We developed a lightweight, power-efficient mechanism based on electrostatic-braking technology. Using only 1 motor, our mechanism enabled a 10-DoF manipulator to perform a complex multi-object manipulation task. |
2023 |
|
|
|
From crowd motion prediction to robot navigation in crowdsSriyash Poddar, Christoforos Mavrogiannis, Siddhartha SrinivasaProceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) video / code / pdf / We investigate the transfer of state-of-the-art human motion prediction models to the crowd navigation performance of a mobile robot. |
|
|
PuSHR: A multirobot system for nonprehensile rearrangementSidharth Talia, Arnav Thareja, Christoforos Mavrogiannis, Matt Schmittle, Siddhartha SrinivasaInternational Conference on Intelligent Robots and Systems video / code / pdf / Using MuSHR racecars, we built a multirobot system that combines task assignment, multiagent motion planning, and decentralized control to automatically rearrange a cluttered workspace. |
|
|
Winding through: Crowd navigation via topological invarianceChristoforos Mavrogiannis, Krishna Balasubramanian, Sriyash Poddar, Anush Gandra, Siddhartha SrinivasaIEEE Robotics and Automation Letters video / pdf / We formalize passing between two agents as a rotation, using a notion of topological invariance, and build a MPC that expedites passing progress in crowded spaces. We demonstrate our approach on a self-balancing robot navigating among 3 users in a lab experiment. |
|
|
Core challenges of social robot navigation: A surveyChristoforos Mavrogiannis, Francesca Baldini, Allan Wang, Dapeng Zhao, Pete Trautman, Aaron Steinfeld, and Jean OhACM Transactions on Human-Robot Interaction pdf / We organize challenges in social robot navigation into a set of categories related to broader open problems in robot planning, behavior design, and evaluation methodologies. We review past work, diagnose limitations of adopted practices, and offer constructive feedback and directions for future research. |
2022 |
|
|
|
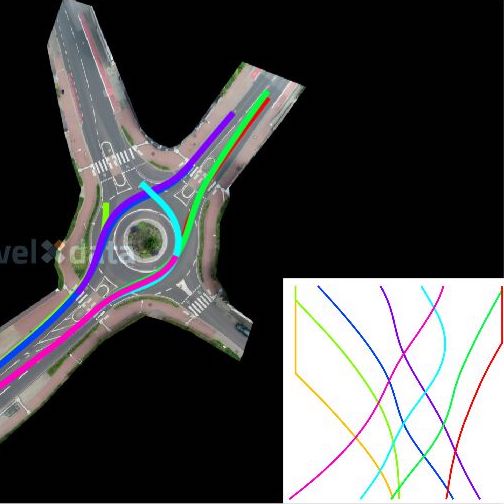
Analyzing multiagent interactions in traffic scenes via topological braidsChristoforos Mavrogiannis, Jonathan DeCastro, Siddhartha SrinivasaIEEE International Conference on Robotics and Automation (ICRA) video / pdf / We show that topological braids can be used as a tool to characterize the interactivity of vehicles, which can be useful for evaluating the richness of existing datasets, but also for synthetically designing balanced training datasets and benchmarks. |
|
|
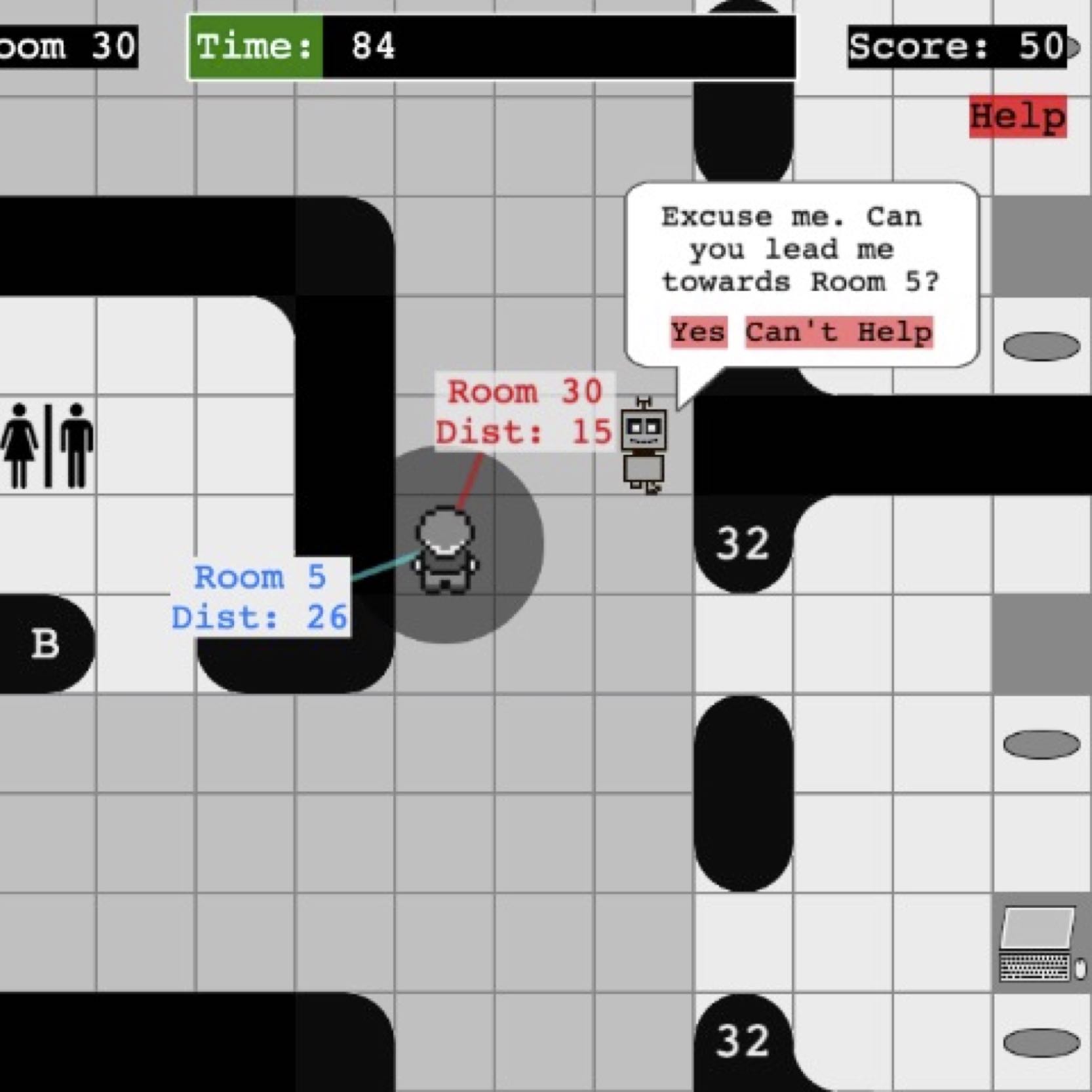
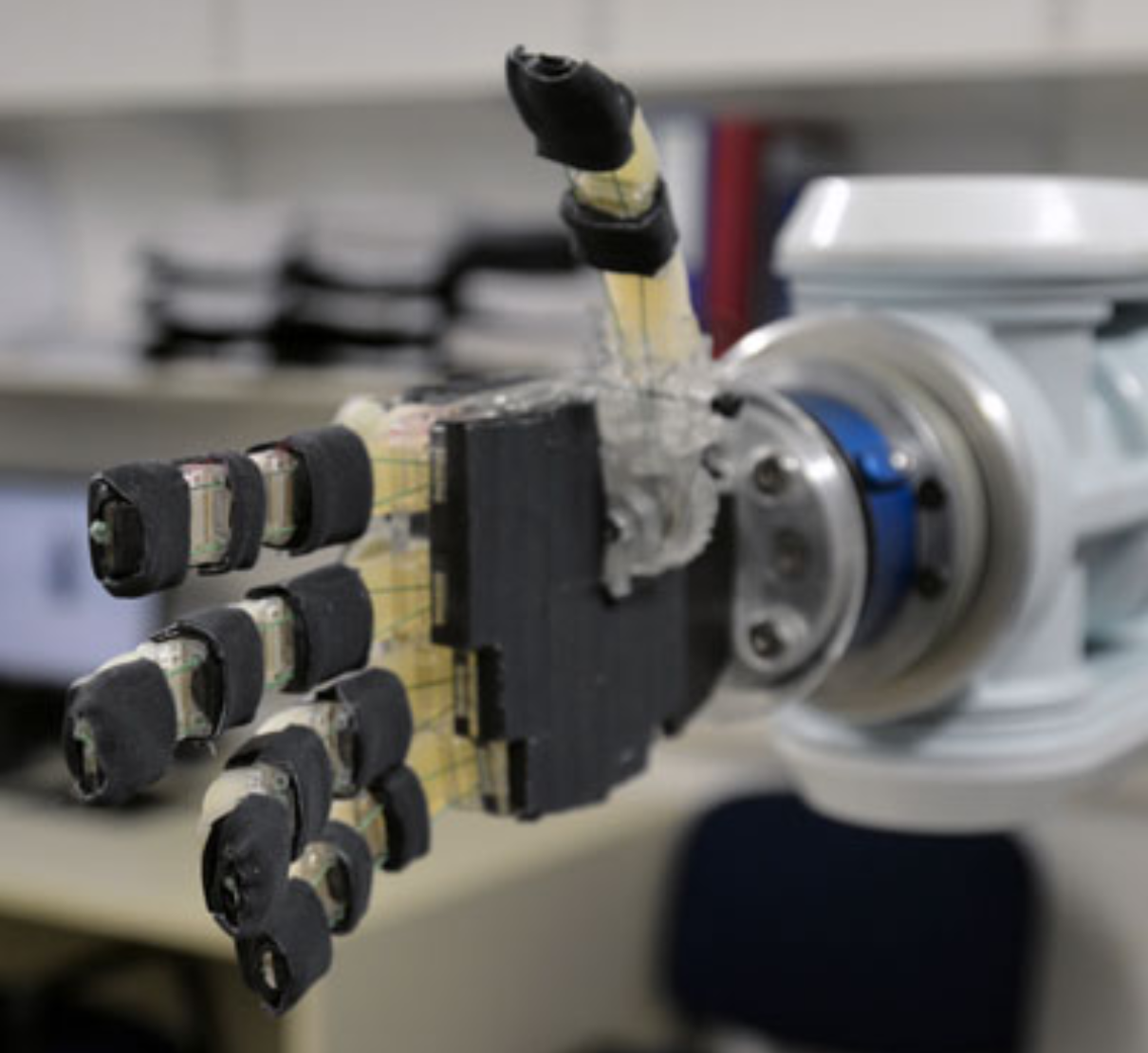
Not all who wander are lost: A localization-free system for in-the-wild mobile robot deploymentsAmal Nanavati, Nick Walker, Lee Taber, Christoforos Mavrogiannis, Leila Takayama, Maya Cakmak, Siddhartha SrinivasaACM/IEEE International Conference on Human-Robot Interaction (HRI) video / code / pdf / We developed a new gripper with optical proximity sensing on fingertips. We demonstrate that proximity sensing enables significantly more accurate object pose estimattion during manipulation compared to tactile sensing. |
|
|
Optical proximity sensing for pose estimation during in-hand manipulationPatrick Lancaster, Pratik Gyawali, Christoforos Mavrogiannis, Siddhartha Srinivasa, Joshua SmithIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) video / pdf / We developed a new gripper with optical proximity sensing on fingertips. We demonstrate that proximity sensing enables significantly more accurate object pose estimattion during manipulation compared to tactile sensing. |
|
|
Social Momentum: Design and evaluation of a framework for socially competent robot navigationChristoforos Mavrogiannis, Patrícia Alves-Oliveira, Wil Thomason, Ross KnepperACM Transactions on Human-Robot Interaction video / pdf / HRI 2019 paper / HRI 2018 paper / We summarize our findings from two large-scale user studies evaluating Social Momentum, a reactive controller for robot crowd navigation. We provide experimental insights and lessons learned for algorithmic and experimental design for social robot navigation. |
2021 |
|
|
|
Group-based motion prediction for navigation in crowded environmentsAllan Wang, Christoforos Mavrogiannis, and Aaron SteinfeldProceedings of the Conference on Robot Learning (CoRL) code / pdf / Inspired by Gestalt theories from psychology, we build a group-based prediction model and integrate it into a MPC, demonstrating higher safety and fewer group intrusions compared to baselines using individual motion prediction across extensive simulations and real-world pedestrian datasets. |
|
|
Influencing behavioral attributions to robot motion during task executionNick Walker, Christoforos Mavrogiannis, Siddhartha Srinivasa, Maya CakmakProceedings of the Conference on Robot Learning (CoRL) code / pdf / We propose a framework that probabilistically maps robot motion to user attributions and use it to generate robot motion that elicits desired attributions while completing a robot vacuum cleaning task. |
|
|
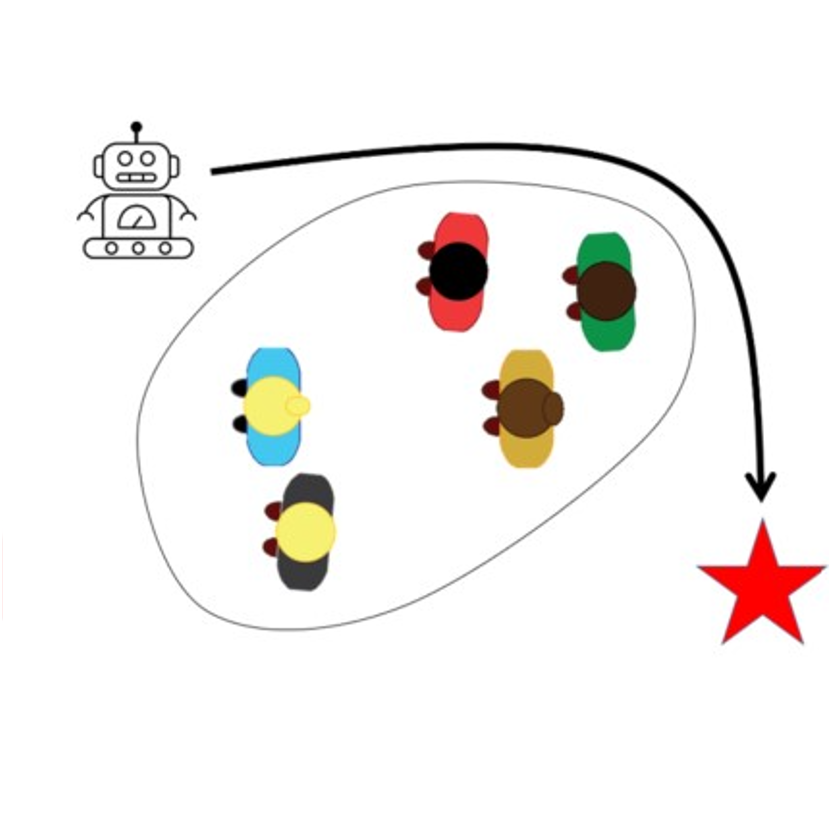
Modeling human helpfulness with individual and contextual factors for robot planningAmal Nanavati, Christoforos Mavrogiannis, Kevin Weatherwax, Leila Takayama, Maya Cakmak, Siddhartha SrinivasaProceedings of Robotics: Science and Systems (RSS) code / pdf / We develop a model of human helpfulness towards a robot that accounts for individual and contextual factors and integrate it in a BAMDP policy that empowers a robot to get more help in a localization task situated in a virtual office environment. |
|
|
Hamiltonian coordination primitives for decentralized multiagent navigationChristoforos Mavrogiannis, Ross KnepperThe International Journal of Robotics Research, WAFR 2018 special issue pdf / WAFR 2018 version / We present a framework that generates multiagent trajectories satisfying desired topological specifications and use it to build a decentralized control policy for navigation in multiagent domains. |
2020 |
|
|
|
Multimodal trajectory prediction via topological invariance for navigation at uncontrolled intersectionsJunha Roh, Christoforos Mavrogiannis, Rishabh Madan, Dieter Fox, Siddhartha SrinivasaConference on Robot Learning (CoRL) video / code / pdf / We abstract traffic at intersections into a set of modes using a notion of topological invariance, and construct a Graph Neural Network based model (MTP) that conditions multiagent trajectory prediction on the likelihood of modes given observation of past behavior. MTP empowers a MPC to safely traverse uncontrolled intersections across a variety of challenging intersection scenarios on the CARLA simulator. |
|
|
Telemanipulation with chopsticks: Analyzing human factors in user demonstrationsLiyiming Ke, Ajinkya Kamat, Jingqiang Wang, Tapomayukh Bhattacharjee, Christoforos Mavrogiannis, Siddhartha S SrinivasaIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) video / pdf / We developed a new system for chopsticks-based telemanipulation and conducted a user study (N=25) to gain insights into human manipulation strategies. We show that our system enables novice users to complete a series of challenging grasping tasks. |
2019 |
|
|
|
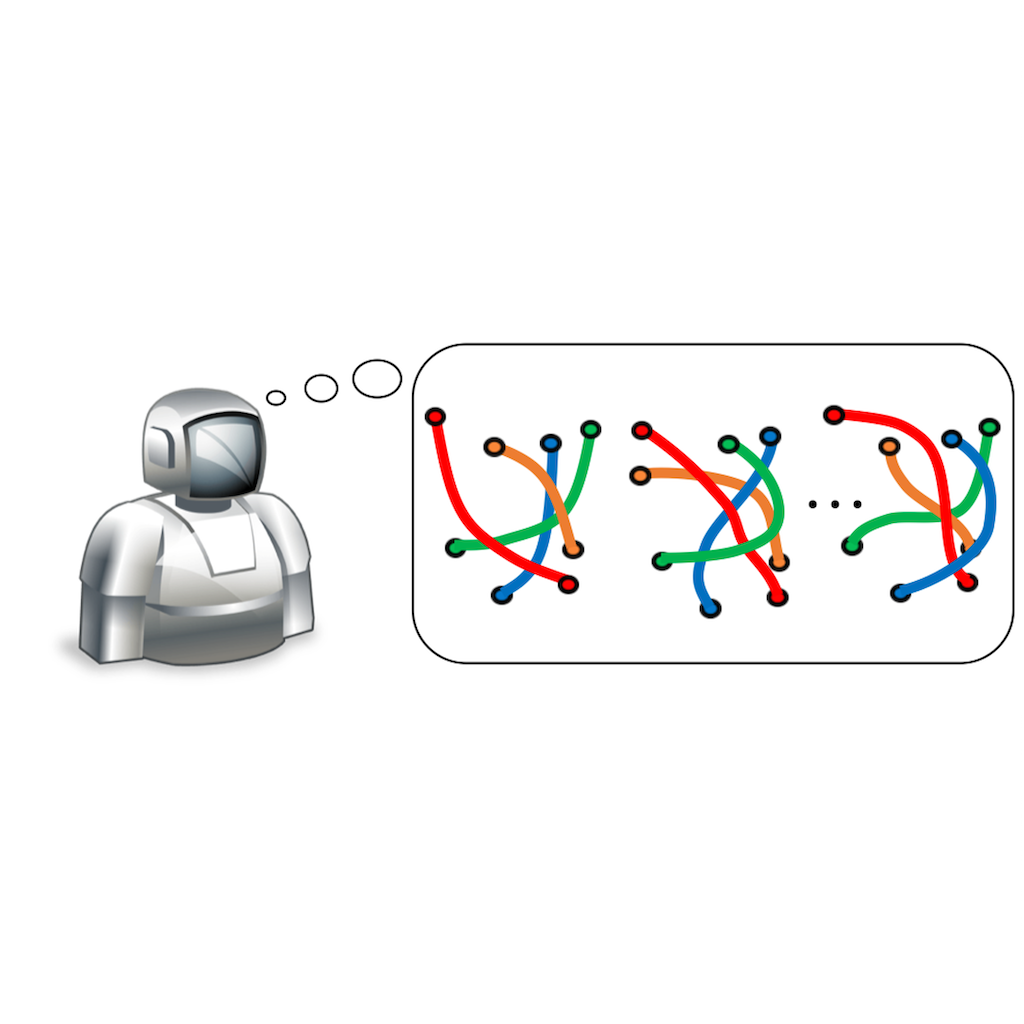
Multi-agent path topology in support of socially competent navigation planningChristoforos Mavrogiannis, Ross KnepperThe International Journal of Robotics Research, WAFR 2016 special issue video / pdf / WAFR 2016 version / We introduce the idea of using topological braids as representatives of coordination strategies braids in multiagent navigation domains. Simulated experiments in a gridworld show that agents reasoning about braids may coordinate efficiently without relying on explicit communication. |
|
|
MuSHR: A low-cost, open-source robotic racecar for education and researchSiddhartha S Srinivasa, Patrick Lancaster, Johan Michalove, Matt Schmittle, Colin Summers, Matthew Rockett, Joshua R Smith, Sanjiban Choudhury, Christoforos Mavrogiannis, Fereshteh SadeghiarXiv tech report video / pdf / website / We present MuSHR, the Multi-agent System for non-Holonomic Racing. MuSHR is a low-cost, open-source robotic racecar for education and research, aspiring to democratize robotics via documentation, tutorials, demos, and courses. |
2017 |
|
|
|
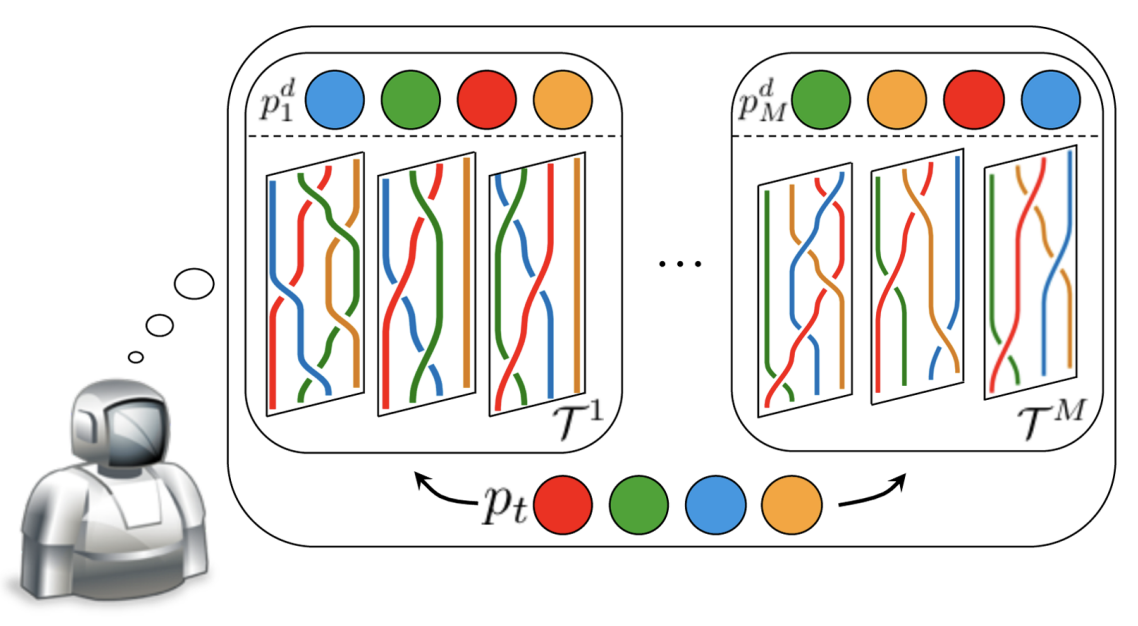
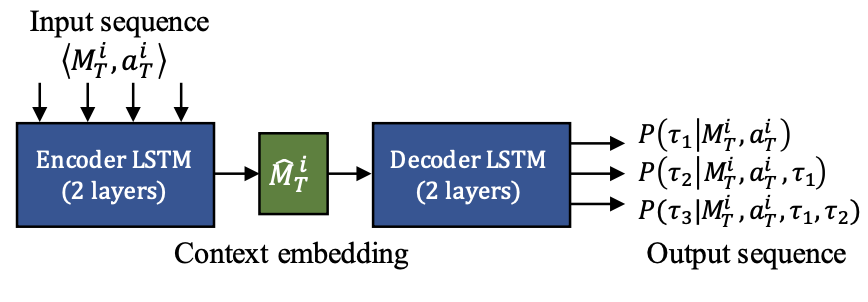
Socially competent navigation planning by deep learning of multi-agent path topologiesChristoforos Mavrogiannis, Valts Blukis, Ross KnepperIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) pdf / We use a LSTM-based architecture to learn a mapping from trajectories to a probability distribution over multiagent navigation strategies, encoded as topological braids. We show that this model enables non-communicating agents to coordinate efficienty across a seris of challenging simulated scenarios. |
|
|
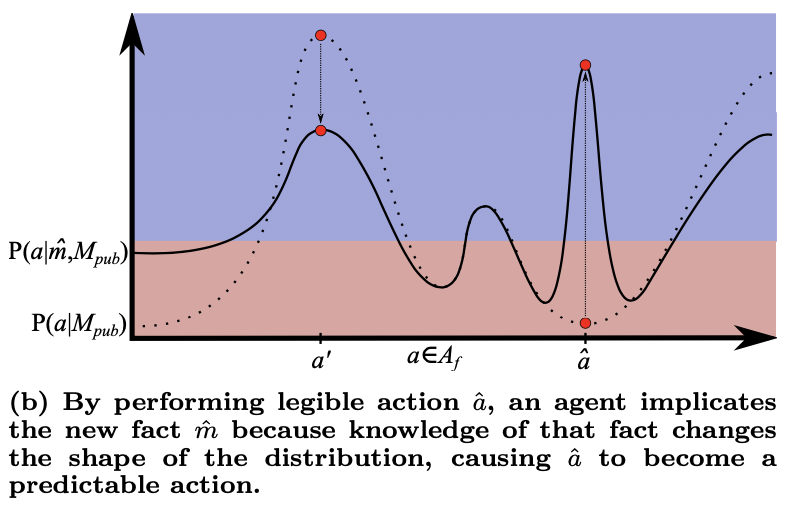
Implicit communication in a joint actionRoss Knepper, Christoforos Mavrogiannis, Julia Proft, Claire LiangACM/IEEE International Conference on Human-Robot Interaction (HRI) pdf / We formalize a general framework that enables robots to encode communicative signals on their actions to seamlessly convey information to their human partners on top of accomplishing the functional objectives of a task. We show how the framework maps onto various modalities, including natural language and motion. |
2015 |
|
|
|
Open-source, anthropomorphic, underactuated robot hands with a selectively lockable differential mechanism: Towards affordable prosthesesGeorge Kontoudis, Minas Liarokapis, Agisilaos Zisimatos, Christoforos Mavrogiannis, Kostas KyriakopoulosIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) pdf / We present a new, open-source mechanical hand, designed according to human anthropometry studies to support the development of low-cost prosthetics. The hand can be assembled using off-the-shelf components and parts fabricated via standard prototyping techniques. |
|
|
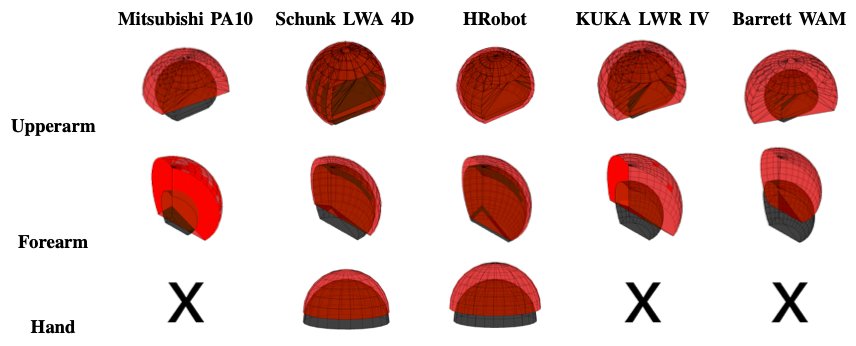
Quantifying anthropomorphism of robot armsChristoforos Mavrogiannis, Minas Liarokapis, Kostas KyriakopoulosIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) pdf / We introduce an index for assessing the anthropomorphism of a robot manipulator by comparing its workspace to the workspace of a human arm. A case study on commercial manipulators demonstrates the value of the approach. |
2014 |
|
|
|
Task-specific grasp selection for underactuated handsChristoforos Mavrogiannis, Charalampos Bechlioulis, Minas Liarokapis, Kostas KyriakopoulosIEEE International Conference on Robotics and Automation (ICRA) pdf / We propose an optimization-based approach for deriving task-specific, force-closure grasps for underactuated robot hands. We demonstrate the efficiency of the approach through simulations with the DLR/HIT II five-fingered robot hand. |
|
|
Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot HandsAgisilaos Zisimatos, Minas Liarokapis, Christoforos Mavrogiannis, Kostas KyriakopoulosIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) pdf / We present a new underactuated robot hand that can be built using off-the-shelf components, and easily fabricated parts. Real-world experiments demonstrate the promise of the design for grasping a wide range of everyday-life objects. |
2013 |
|
|
|
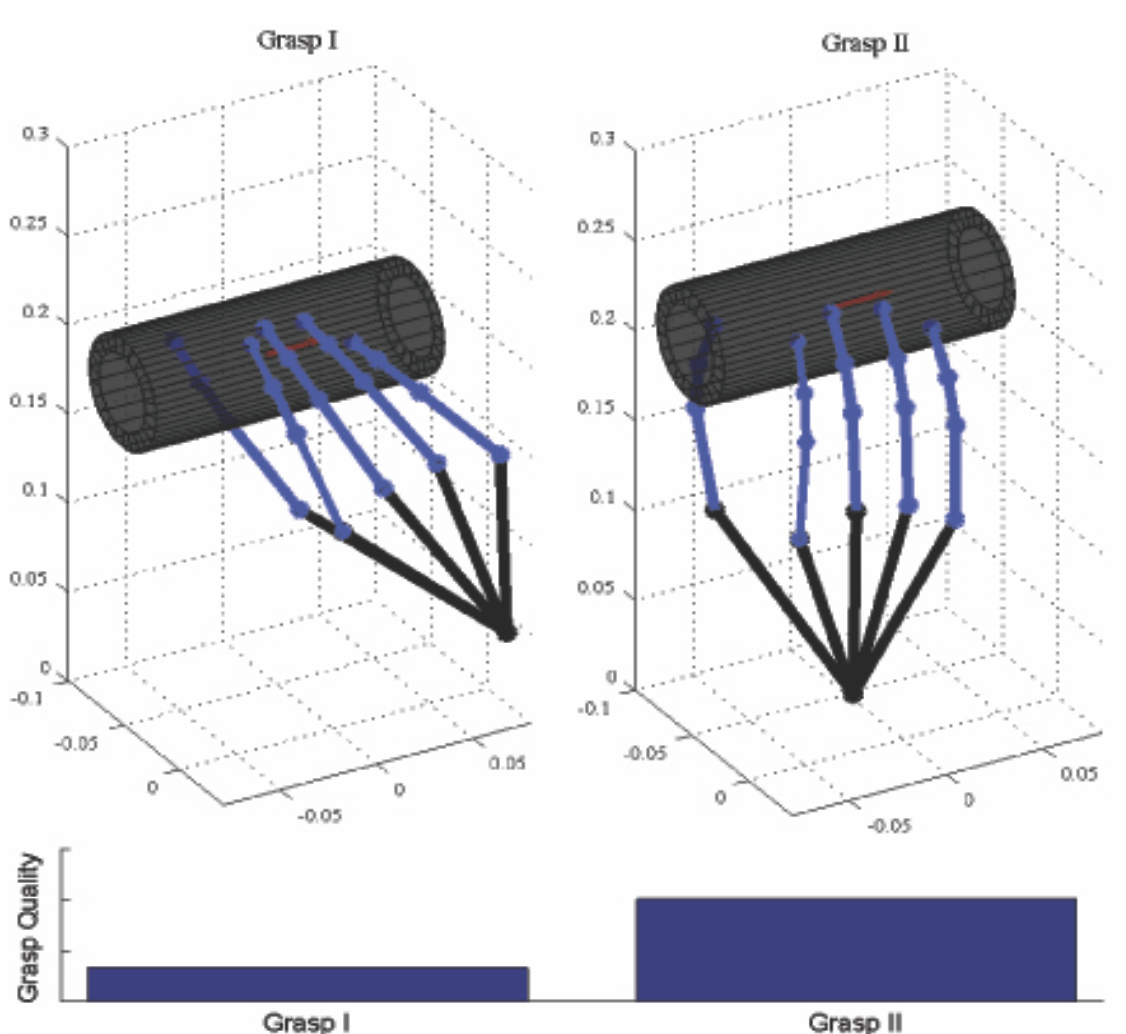
Sequential improvement of grasp based on sensitivity analysisChristoforos Mavrogiannis, Charalampos Bechlioulis, Kostas KyriakopoulosIEEE International Conference on Robotics and Automation (ICRA) pdf / We present an algorithm that takes as input a locally optimal robot grasp and outputs a grasp of higher quality by sequentially perturbing the hand posture and force exertion via sensitivity analysis. Simulations on the DLR/HIT Hand II demonstrate the value of the approach. |